近年来,由于系留卫星系统(TSS)的潜在优点,它已被用于地球观测、空间干涉测量和其他空间任务。系留TSAR(断层合成孔径雷达)系统是一组系留SAR卫星,可以快速部署,为3维地形测绘和运动目标检测提供稳定的基线。成功部署对于 TSAR 系留系统至关重要。多年来已经提出了多种控制方法,包括长度、长度变化率、张力和推力辅助控制。其中,由于系绳具有很强的非线性和欠驱动特性,调整张力是一种可行但具有挑战性的方法。目前的系绳部署方案侧重于二体 TSS,很少强调多 TSS。近日,西北工业大学孟中杰团队在《太空:科学与技术》杂志上发表研究论文,提出了一种低偏心椭圆轨道三体链式系留卫星系统部署新策略。
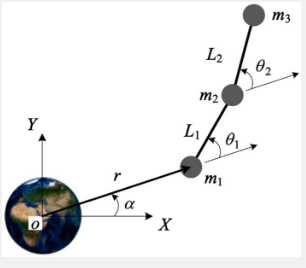
首先,作者建立了三体链式TSS在低偏心椭圆轨道上的运动模型。做出两个假设:(a)系绳没有质量;(b) 仅考虑平面运动。所提出的模型由 3 个点质量(m 1、m 2和m 3)和 2 个无质量系绳(L 1 和L 2)组成,如图 1 所示。m 1的轨道 由其轨道地心距离定义r 和真实异常α;m 2 相对于m 1的位置由系链L 1 和面内振动角θ 1 确定。m 3 相对于m 2的位置由L 2 和θ 2 确定。使用拉格朗日公式推导了三体 TSS 的动力学模型,运动方程以欧拉-拉格朗日形式表示为 M ( q ) q̈ + C ( q , q̇ ) q̇ + G ( q ) = Q 以及广义坐标q = ( r , α , θ 1 , θ 2 , L 1 , L 2 ) T。由于 TSS 模型是典型的欠驱动系统,广义坐标被分解为两部分,即驱动配置向量 ( q a = ( L 1 , L 2 ) T ) 和未驱动配置向量 ( q ua = ( r , α , θ 1 , θ 2 ) T )。
然后,作者介绍了一种新颖的三体链式 TSS 部署方案。采用逐颗弹射卫星的顺序部署策略来避免碰撞,该方法直接利用了二体系统的部署技术;利用庞加莱递推定理、泊松稳定性和李代数秩条件(LARC)来分析欠驱动 TSS 系统的可控性。指数和统一部署法则的结合产生了简单有效的部署方案,为卫星部署提供了必要的参考轨迹。在展开过程中,由于系绳的特性,必须保证正张力,并且为了避免系绳断裂,张力不能超过给定的边界。因此,部署过程可以简化为具有受限控制输入的欠驱动控制。为了解决这个限制,设计了分层滑模控制器(HSMC)来实现精确的轨迹跟踪。控制器框架如图2所示。在控制器中,引入了辅助系统来减轻系绳张力约束引起的输入饱和。构建了整个 TSS 的 3 层滑动表面。引入扰动观测器(DO)来估计二阶导数信号q̈。滑动面的不确定性及其轨道运动的时间导数 ( r , α ) 通过基于滑模的鲁棒微分器进行估计。
最后,作者进行了数值模拟并得出结论。为了验证所提出的部署方案(标记为方案3)的有效性,使用了2种替代部署方案进行比较。方案1中,系统被视为2个独立的2体,其中系绳长度L 2 保持恒定,只有张力T 1 可调。在方案2中,系统被视为两个2体,但忽略了相邻系绳之间的耦合。也就是说,系绳L 1 仅影响角度θ 1 且L 2 仅影响角度θ 2。方案1和方案2采用文献中的部署控制器(Murugathasan L, Zhu ZH. Deployment control of Tethered Space Systems with Explicit Velocity Constraining and Invariance Principle. Acta Astronaut. 2019;157:390–396.)。结果表明,方案3下系链展开误差和振动角在3 h(略多于一个轨道周期)内渐近收敛于0,且方案1和方案2下的展开误差远大于方案3。基于跟踪误差和系绳张力的积分,对方案 2 和方案 3 进行比较,归一化结果如图 3 所示。与方案 2 相比,所提出的 HSMC 明确考虑了 3 体 TSS 耦合,从而以更小的面内角度实现更快、更准确的系绳部署,这进一步表明在所提出的方案下实现了相当好的部署过程,并证实了所提出的部署方案的有效性。
版权声明:本文由用户上传,如有侵权请联系删除!